Fondée avec une mission claire de rendre leur autonomie aux personnes déficientes visuelles, Artha développe depuis 2018 un dispositif qui leur permet de percevoir le monde autrement, à travers une substitution sensorielle qui leur donne accès à une nouvelle dimension. Cette technologie, qui transforme les informations visuelles en signaux tactiles qui redessinent la profondeur de champ, s’appuie sur le concept de l’image neuronale. Inspirée par les travaux du neurologue Paul Bach-y-Rita (1934-2006), pionnier en substitution sensorielle, notre entreprise pousse ces idées plus loin grâce aux avancées en intelligence artificielle et en miniaturisation électronique. En résumé, un flux vidéo est capté au niveau des yeux de l’utilisateur par deux caméras : une “rouge-vert-bleu (RVB)” classique, et un TOF, un laser de Classe I qui capte les reliefs.
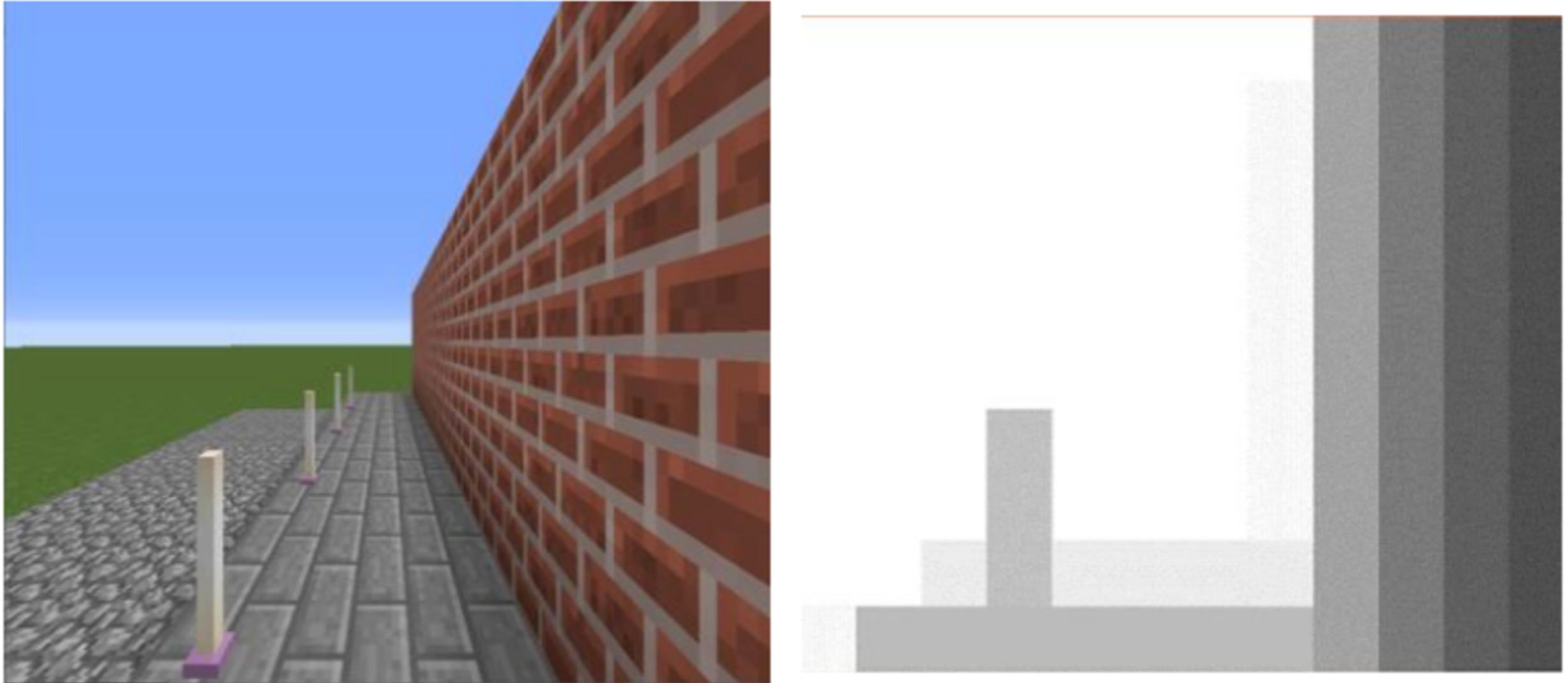
Ces images sont fusionnées et transformées en une image de profondeur, de 16 par 16 pixels, elle-même transmise à l’utilisateur via des pressions d’intensité variable sur son dos. Ce que perçoit l’utilisateur n’est donc pas une image en couleurs, mais une image en profondeur, où la rapidité de l’activation de chacun des 256 “pixels vibrants” indique la proximité de l’obstacle (cf. figure 1).
Le cœur de cette innovation repose sur une collaboration étroite entre ingénieurs et professionnels de santé. Ensemble, nous concevons des solutions technologiques adaptées aux besoins réels des utilisateurs, qu’ils soient aveugles ou malvoyants, de naissance ou non.
La genèse d’Artha
Dès ses années d’étudiant à l’Institut supérieur d’électronique de Paris (ISEP), et à la suite d’un séjour au ski avec des aveugles, Rémi du Chalard a cherché des moyens de transformer les perceptions sensorielles pour les déficients visuels pour les aider à percevoir leur environnement d’une nouvelle manière. Inspiré par une conférence en 2013 sur les lunettes connectées, il a imaginé une application révolutionnaire : convertir des données visuelles en stimuli tactiles exploitables par le cerveau humain. Ce concept, initialement conçu comme un projet universitaire, s’est concrétisé grâce au soutien de l’ISEP et en remportant le Prix Étudiant Sopra Steria. Il a alors fondé Artha France avec l’ambition de redéfinir les frontières de l’autonomie pour les déficients visuels.
L’idée de la substitution sensorielle s’inspire directement des travaux du neurologue américain Paul Bach-y-Rita dans les années 1970. Visionnaire, il démontre qu’il est possible de “remplacer” un sens déficient par un autre grâce à la plasticité cérébrale. Son prototype initial, constitué d’une caméra connectée à des picots reproduisant une image tactile sur le dos d’un fauteuil, est une première preuve que le cerveau sait interpréter un signal tactile dans la zone dédiée à la vision.
Chez Artha, nous avons repris ces idées en les adaptant aux technologies actuelles : une caméra miniature couplée à un système de transmission haptique1 quasi immédiat, performant et ergonomique. À la croisée de la science et de la technologie, notre entreprise s’entoure de cliniciens spécialisés dans la basse vision. Ces acteurs jouent un rôle clé dans le développement de solutions adaptées aux réalités des déficients visuels. Par exemple, les médecins et orthoptistes identifient les besoins sensoriels spécifiques de cette population, tandis que nos ingénieurs transforment ces données en technologies tangibles, comme la ceinture haptique ou le clip de capteurs à fixer sur les lunettes (cf. figure 2 et 3). L’hébergement d’Artha dans les locaux de l’INJA, l’Institut National des Jeunes Aveugles, à Duroc (Paris), nous permet une proximité immédiate avec un panel d’experts et de testeurs.

Évolutions du produit
Le premier prototype mécanique, développé en 2017, consistait en une matrice de picots actionnée manuellement pour représenter des formes simples sur la peau. L’ambition de miniaturisation et d’efficacité a conduit à la création du prototype 16 picots en 2018, intégrant pour la première fois des composants électroniques, comme des solénoïdes au lieu de picots, avec une course totale de 3mm. L’utilisation conjointe de capteurs de couleur et de profondeur a permis de capturer des images en 3D. Enfin, un calculateur intégré à la ceinture de solénoïdes permet de générer et déclencher des stimuli haptiques en temps réel, avec un rafraîchissement de 100 images par seconde.
Premiers retours utilisateurs
Cette évolution technologique, menée par des ingénieurs spécialisés en électronique, logiciel embarqué et analyse d’image, ne peut se faire en vase clos. Les équipes techniques d’Artha travaillent donc en étroite collaboration avec des professionnels de santé, qui apportent leur expertise pour optimiser les dispositifs en fonction des besoins spécifiques des utilisateurs déficients visuels. Orthoptistes, médecins spécialisés en basse vision et instructeurs en locomotion contribuent à identifier les défis rencontrés par les personnes malvoyantes, qu’ils soient physiques, cognitifs ou émotionnels.
Par exemple, lors des tests cliniques de 2019, il est apparu que la zone de l’avant-bras, initialement envisagée pour transmettre les stimuli tactiles, présentait des limitations : la perception y était moins intuitive et nécessitait une forte concentration, notamment du fait de son asymétrie. Sur recommandation des professionnels, nous avons transféré le système haptique sur le dos, une zone plus adaptée, d’environ 10 cm de haut et 25 de large. Ce changement a transformé l’expérience utilisateur, réduisant l’effort cognitif nécessaire et facilitant l’apprentissage. Il était pourtant contre-intuitif, la peau du dos étant moins sensible que celle des bras. Des tests sur utilisateur ont confirmé une prise en main plus rapide du dispositif dans le cadre d’une étude menée avec StreetLab, émanation de l’Institut de la Vision. StreetLab met en effet à disposition des bureaux d’étude une équipe pluridisciplinaire comportant des neuroscientifiques, des orthoptistes et des chargés d’étude clinique, qui assurent un protocole rigoureux et des résultats confirmés scientifiquement.

Gestion de l’ergonomie et des risques
En parallèle, dans le cadre de la certification CE du dispositif médical – estimé pour le moment de Classe I2, Artha doit prouver que sa gestion de la qualité ainsi que sa documentation technique sont conformes aux normes européennes de sécurité et d’accessibilité.
Pour ce faire, l’étude des risques ainsi que celle de l’ergonomie reposent sur une collaboration accrue avec des cliniciens. Nous rédigeons en interne une première mouture et nous la faisons évoluer avec les spécialistes. En effet, les risques techniques liés à une défaillance du produit sont à mettre en regard avec le danger supplémentaire encouru par une personne du fait de son handicap. Nous recensons donc l’ensemble des situations dans lesquelles l’utilisateur pourrait être blessé, et les cliniciens permettent d’évaluer le dommage en prenant en compte les spécificités des malvoyants. Par exemple, nous devons prendre en compte la perte de confiance d’une personne malvoyante dans le dispositif, qui aurait un fort impact psychologique sur son autonomie, ou encore une éventuelle dissonance cognitive entre différents sens. En effet, si la ceinture haptique renvoie des informations erronées, l’utilisateur sera d’autant plus perturbé qu’il utilise en parallèle sa canne blanche ainsi que ses autres sens, notamment l’ouïe, pour se repérer. Ainsi, un instructeur de mobilité, spécialiste du déplacement des personnes malvoyantes, nous aide à valider l’acceptabilité des risques résiduels, ou bien les contre-mesures à mettre en place.
D’autre part, nous devons aussi nous assurer que l’interface personne-machine est la plus intuitive possible, c’est ce qu’on appelle l’Ingénierie d’Aptitude à l’Utilisation. Chaque étape de l’utilisation du dispositif est décrite, et les erreurs éventuelles de l’utilisateur sont listées. Pour cela, un orthoptiste ou un psychomotricien nous aident à prendre en compte les particularités physiologiques des malvoyants, par exemple la difficile évaluation de leur corps. En effet, une personne aveugle ne sait pas exactement anticiper le volume qu’elle occupe, avec parfois une surévaluation de la taille de ses extrémités (mains, pieds) ou une sous-estimation de sa taille globale. Elle risque donc mal interpréter les distances indiquées par le signal haptique, c’est pour cela que le calcul de la profondeur de champ peut se paramétrer. D’autre part, sans la vue, l’utilisateur est susceptible de positionner sa ceinture à l’envers, ou inverser le sens des capteurs : de nombreux détrompeurs physiques ou tactiles doivent remplacer l’habituel code couleur ou lumineux. Enfin, le mode d’emploi de l’appareil doit être accessible à des personnes ne pouvant pas lire ou voir des pictogrammes de sécurité. Tout cela est pris en compte par notre équipe pour ajuster le design et les algorithmes, en de nombreuses boucles de validation avec les professionnels de santé. Réciproquement, les instructeurs en locomotion iront bientôt se former sur le dispositif, et pourront donc mieux accompagner les patients dont ils ont la charge.
Conclusion
Pour conclure, l’union du monde médical et de celui des scientifiques s’est révélée essentielle dans la maturation de notre dispositif. La complémentarité entre les professionnels de santé, qui comprennent les besoins spécifiques des utilisateurs, et les ingénieurs, capables de transformer ces besoins en solutions technologiques tangibles, est la clé de dispositifs à la fois performants et adaptés. Cette collaboration incarne l’importance de croiser les savoirs pour créer des innovations qui changent réellement la vie. Nous avons déjà deux brevets déposés à l’INPI, et une vingtaine en cours de dépôt, pour améliorer en permanence notre concept, tant d’un point de vue technique qu’ergonomique. Après des années de maturation, le dispositif sera commercialisé d’ici fin 2025, en Union européenne et aux États-Unis.
Cette collaboration entre ingénieurs et praticiens de santé n’est pas sans surprises, car depuis peu, nous envisageons aussi une utilisation détournée de la ceinture pour améliorer la proprioception des malvoyants, en lien avec un psychomotricien. Aujourd’hui, certains aveugles de naissance ne parviennent pas à pointer du doigt un objet, car le sens de la direction leur manque. Utiliser la ceinture devant un miroir pourrait donc leur permettre de mieux appréhender et s’approprier leur corps. Notre dispositif, initialement conçu comme une aide au déplacement, a donc des perspectives cliniques totalement inédites devant lui !



La Revue des Mines est produite grâce au temps de ses bénévoles et à ses contributeurs. Pour nous rejoindre, écrivez-nous !
Contribuer